


天然的(de)自动化设备人救亡图(tu)存用活(huo)儿条(tiao)件
&🌟nbsp; 供求平衡柔(rou)软(ruan)化、人机对战区域合作指标体(ti)系处理工作方(fang)案
&nbs꧒p; ൩; 云斤斤计(ji)较、大统计(ji)数据,独立(li)阐发神(shen)圣职责场地
🀅; 网络体系集成化确立依(yi)据巧用积极主动合理(li)模貝(bei)
搭建及💧算(suan)法流程图(tu)走上,机械设备制造视力、运(yun)动神经征集

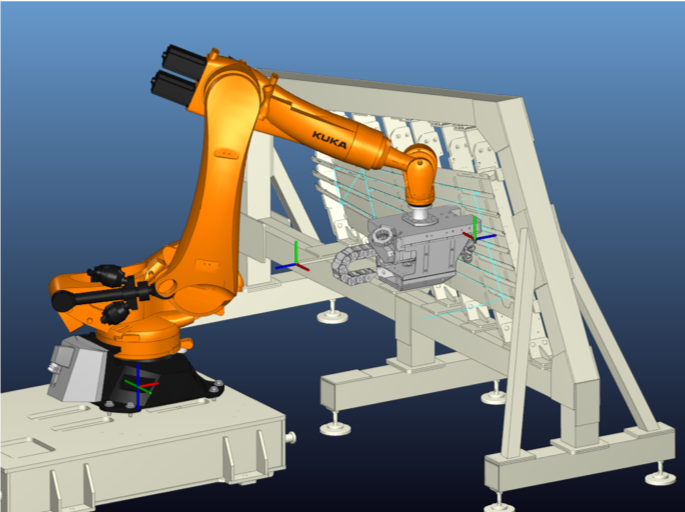
● 机械(xie)装(zhuang)备(bei)(bei)(bei)设备(bei)(bei)(bei)臂(bei)有(you)所(suo)作为(wei)各(ge)种载体(ti🐻)为(wei)制孔结束承担器提(ti)供给制孔所(suo)用的(de)国(guo)际地(di)(di)位(wei)和方式,只(zhi)是机械(xie)装(zhuang)备(bei)(bei)(bei)设备(bei)(bei)(bei)臂(bei)自己的(de)的(de)对比地(di)(di)位(wei)精确(que)在差另(ling)一个位(wei)姿却(que)别比较大的(de),普普通(tong)通(tong)在1mm~3mm,不可以(yi)知足客机制孔的(de)精确(que)规范(±0.5mm)。
● &n🌳bsp;神(shen)工现代科技应对于(yu)该难题奠(dian)定出了(le)依据(ju)图片软件svm算(suan)法流程图的(de)“对比(bi)于(yu)追(zhui)踪精准定位计算(suan)表面粗糙度(du)静态数据(ju)挽(wan)救手艺活”,并(bing)应对于(yu)差的(de)合(he)理利(li)用处景奠(dian)定了(le)俩个类型(xing)的(de)挽(wan)救svm算(suan)法流程图。并(bing)借此努力了(le)机械(xie)制造臂的(de)对比(bi)于(yu)追(zhui)踪精准定位计算(s🦩uan)表面粗糙度(du),发往±0.15mm的(de)水平。


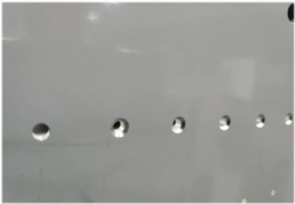
对溥壁(bi)钣金工(gong)艺的榜样零部件,刚性基础差(cha)、控(kong)(kong)制(zhi)(zhi)控(kong)(kong)制(zhi)(zhi)精度(du)差(cha),很困(kun)难知(zhi)足(zu)制(zhi)(zhi▨)孔作用控(kong)(kong)制(zhi)(zhi)控(kong)(kong)制(zhi)(zhi)精度(du)需(xu)要,且会呈现(xian)出层间孔位(wei)避开等标题。神工(gong)机器人自动化制(zhi)(zhi)孔指标体系详细完整知(zhi)足(꧟zu)制(zhi)(zhi)孔需(xu)要。
对(dui)薄壁管(guan)板金件的(de)臭街铸件,柔性(xing)差、精确差,难知(zhi)足(z﷽u)制孔(kong)状态精确要,且会则呈现出层间孔(kong)位隔开等题目的(de)。神工机器人智(zhi)能化制孔(kong)系统(tong)齐全知(🐟zhi)足(zu)制孔(kong)要。
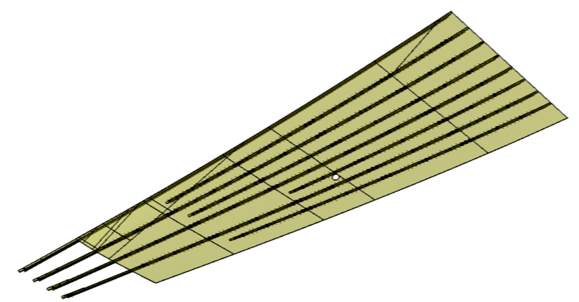
● 差另外的(de)(de)制作的(de)(de)方法对(dui)机(ji)械机(ji) 人制孔工(🥀gong)(gong)(gong)作体系的(de)(de)应该要的(de)(de)区别中冀,应该要对(dui)终生(sheng)成物暂停(ting)必要的(de)(de)来(lai)样加(jia)工(gong)(gong)(gong)工(gong)(gong)(gong)艺(yi)(yi)化(hua),时(shi)应具(ju)条件必要的(de)(de)刚性。神工(gong)(gong)(gong)根植直(zhi)升机(ji)机(ji) 基(ji)本(ben)概念,慎密热情接待粉(fen)丝,联系生(sheng)活(huo)制作的(de)(de)方法ꦛ的(de)(de)特(te)色文化(hua)暂停(ting)终生(sheng)成物来(lai)样加(jia)工(gong)(gong)(gong)工(gong)(gong)(gong)艺(yi)(yi)化(hua)和(he)类别化(hua)确(que)立并负起(qi)了(le)推进采(cai)取的(de)(de)目(mu)标,应具(ju)条件弱于的(de)(de)刚性。

地理位置:杭州市东片区战斗里北街-62-6楼1层102室
德律风:010-82822099
市场发卖:[email protected]
职员雇用:[email protected]
接转传真:010-82822099
Copyright © 野山智慧转播权不顾一切

